Contrôler un servomoteur¶
Permet de contrôler l'angle d'un servomoteur de 0° à 180°.
Branchement¶

Exemple¶
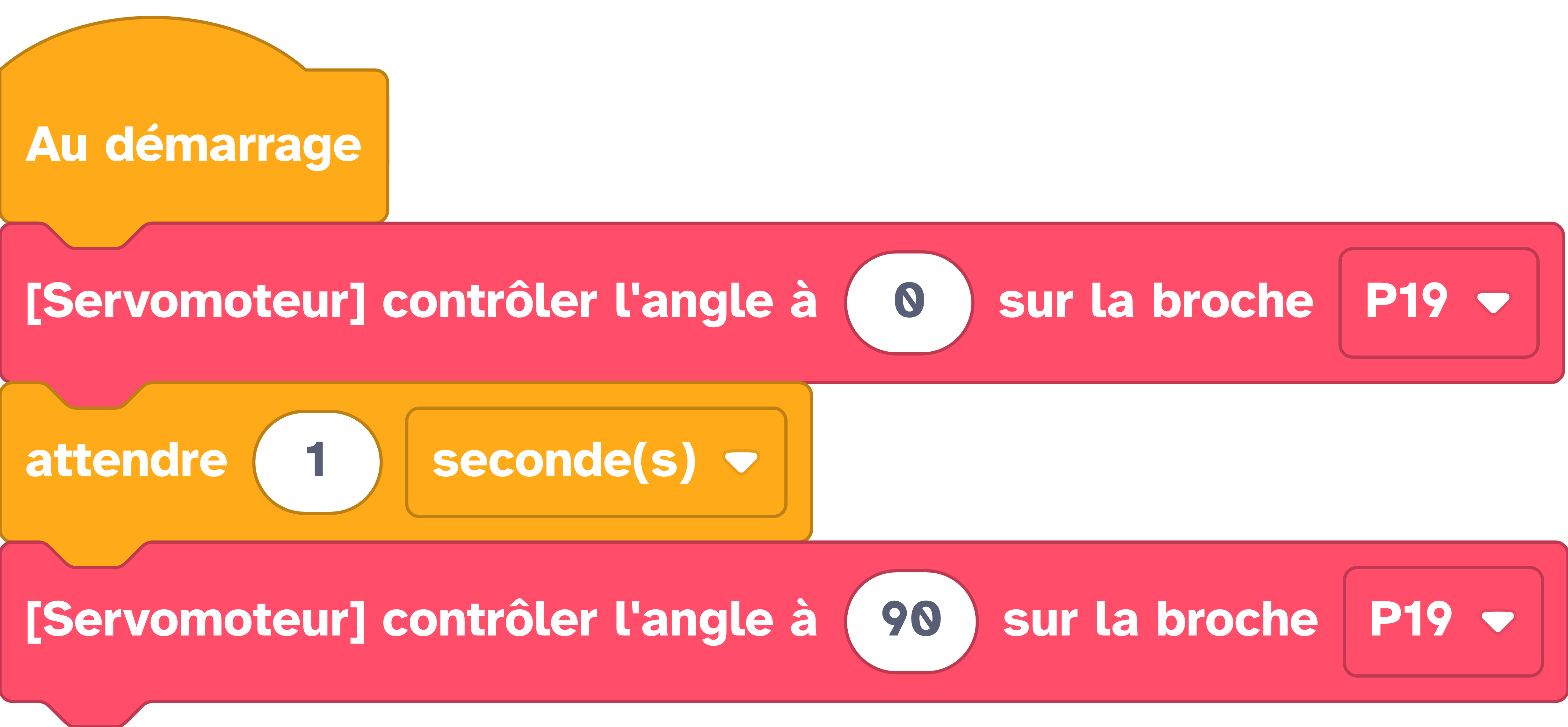
Dans l'exemple ci-dessous, nous allons placer le servomoteur (branché sur le port Grove 1, broche P19 de la Galaxia) à 0° pendant une seconde puis le placer à 90° :
from machine import *
import utime
# Initialisation du servomoteur sur la broche P19
p19 = PWM(Pin(13), freq=50, duty=205)
# Déclaration d'une fonction qui va s'occuper de positionner
# le servomoteur à un angle passé en paramètre
# (si cet angle est bien compris entre 0 et 180)
def setServoAngle(pin, angle):
if (angle >= 0 and angle <= 180):
pin.duty(int(0.025*1023 + (angle*0.1*1023)/180))
else:
raise ValueError("Attention, l'angle du servomoteur doit etre compris entre 0 et 180")
setServoAngle(p19, 0)
utime.sleep(1)
setServoAngle(p19, 90)
Aller plus loin¶
Dans l'exemple ci-dessus, nous utilisons la class PWM() qui permet, entre autres, de contrôler un servomoteur. Cette classe est détaillée dans la documentation MicroPython.